|
I obtained my Ph.D. in the Department of Computer Science working at the Continuum Robotics Laboratory at the University of Toronto, Canada. I worked on continuum robotics, machine learning, and fundamental transformation. Before all that, I completed a B.Sc. and an M.Sc. Degree in Mechatronics at the Leibniz University Hannover, Germany in 2016 and 2018, respectively. From 2018 to 2019, I worked as a research assistant at the Lehrstuhl fuer Kontinuumsrobotik at the Leibniz University Hannover. Email / Bio / Google Scholar / GitHub / Semantic Scholar I stated a blog called Flatland Robotics. Most of my posts are tutorials and philosophical explorations.
|

|
|
I'm interested in continuum robotics, machine learning, and dual quaternions. Aside from that, creativity, innovation, embodied intelligence, and the philosophy of science are also part of my field of interest to some extent. During my research adventures, I have gratefully collaborated with or am still collaborating with (in alphabetical order) T. Baena Moura, M. N. Bartholdt, J. Burgner-Kahrs, N. Cancelliere, R. Z. Chen, A. Consolic, P. T. Dewi, S. Haddadin, T. Hamoda, L. Johannsmeier, V. Mendes Pereira, V. Modes, Ch. Muhmann, P. Le, N. Liang, S. Lilge, Q. Peyron, P. Rao, A. Senyk, C. Shentu, and G. Zogaj. |
|
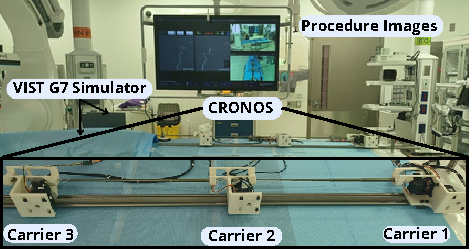
Thais Baena Moura, Arturo Consolic, Reinhard M. Grassmann, Greta Zogaj, Nicole Cancelliere, Jessica Burgner-Kahrs, Vitor Mendes Pereira JMRR, 2025 world scientific / BibTex We present the design, development, and evaluation of a continuum robot for neurovascular surgery. #Systempaper #ContinuumRobot |
|
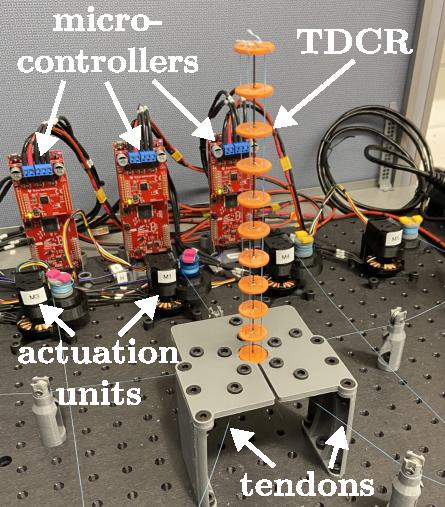
Christian Muhmann, Reinhard M. Grassmann, Max Bartholdt, Jessica Burgner-Kahrs IROS, 2025 (accepted) reprint / arXiv / BibTex Dynamic model and robot-based evaluation for a tendon-driven continuum robot with five tendons using Clarke transfrom. #Manifold #Dynamics #ContinuumRobot #Systempaper |
|
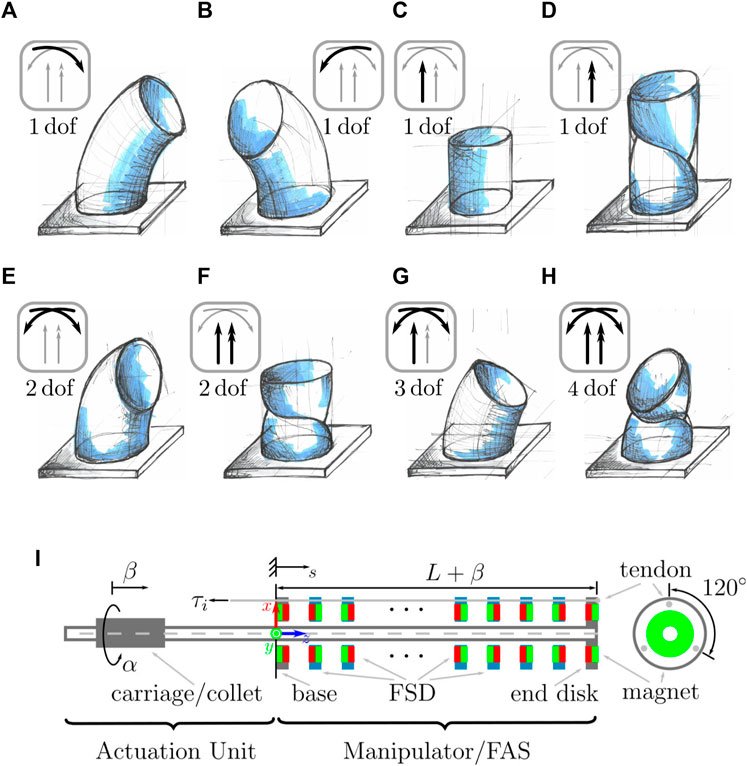
Reinhard M. Grassmann, Jessica Burgner-Kahrs arXiv, 2025 preprint / arXiv / BibTex We revisit and extend the displacement-actuated continuum robot to feature an increasingly popular length extension and an underutilized twisting. #Abstraction #ContinuumRobot |
|
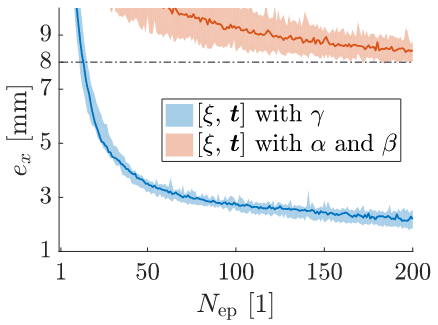
Reinhard M. Grassmann, Jessica Burgner-Kahrs IEEE RA-L, 2025 preprint / IEEE Xplore / arXiv / BibTex We prove that improved state parameterizations for soft and continuum robots are specific cases of Clarke coordinates. #Manifold #Representation #ContinuumRobot |
|
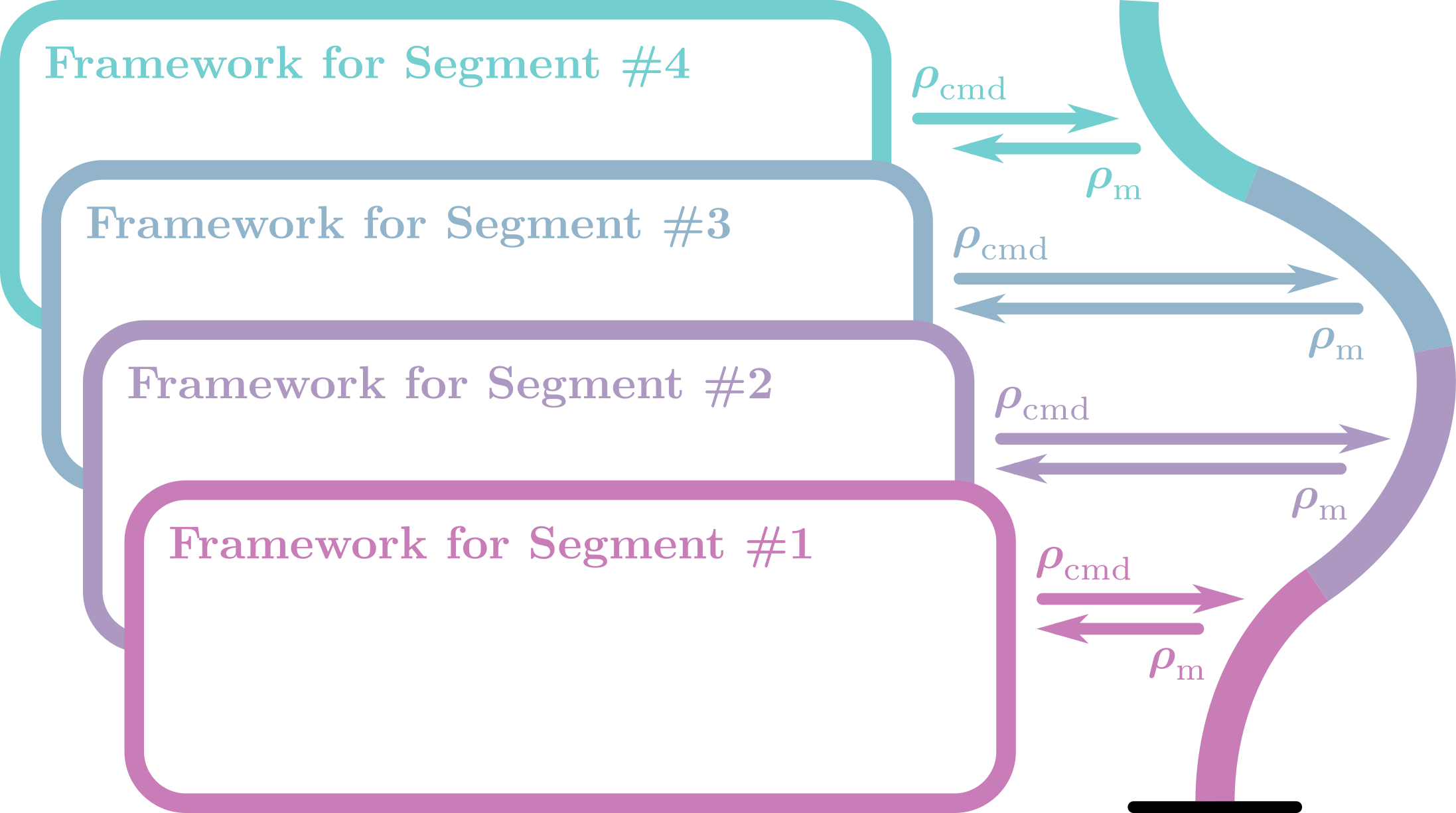
Reinhard M. Grassmann, Jessica Burgner-Kahrs arXiv, 2024 preprint / arXiv / BibTex We propose to develop frameworks using Clarke coordinates that lead to canonical forms of the components of the frameworks. #Manifold #Representation #ContinuumRobot |
|
Reinhard M. Grassmann, Jessica Burgner-Kahrs IEEE RoboSoft, 2025 (spotlight) reprint / IEEE Xplore / arXiv / BibTex / slides / poster The proposed encoder-decoder architecture allows us to consider novel mechanical design while reusing existing approaches. #Manifold #EncoderDecoder #ContinuumRobot |
|
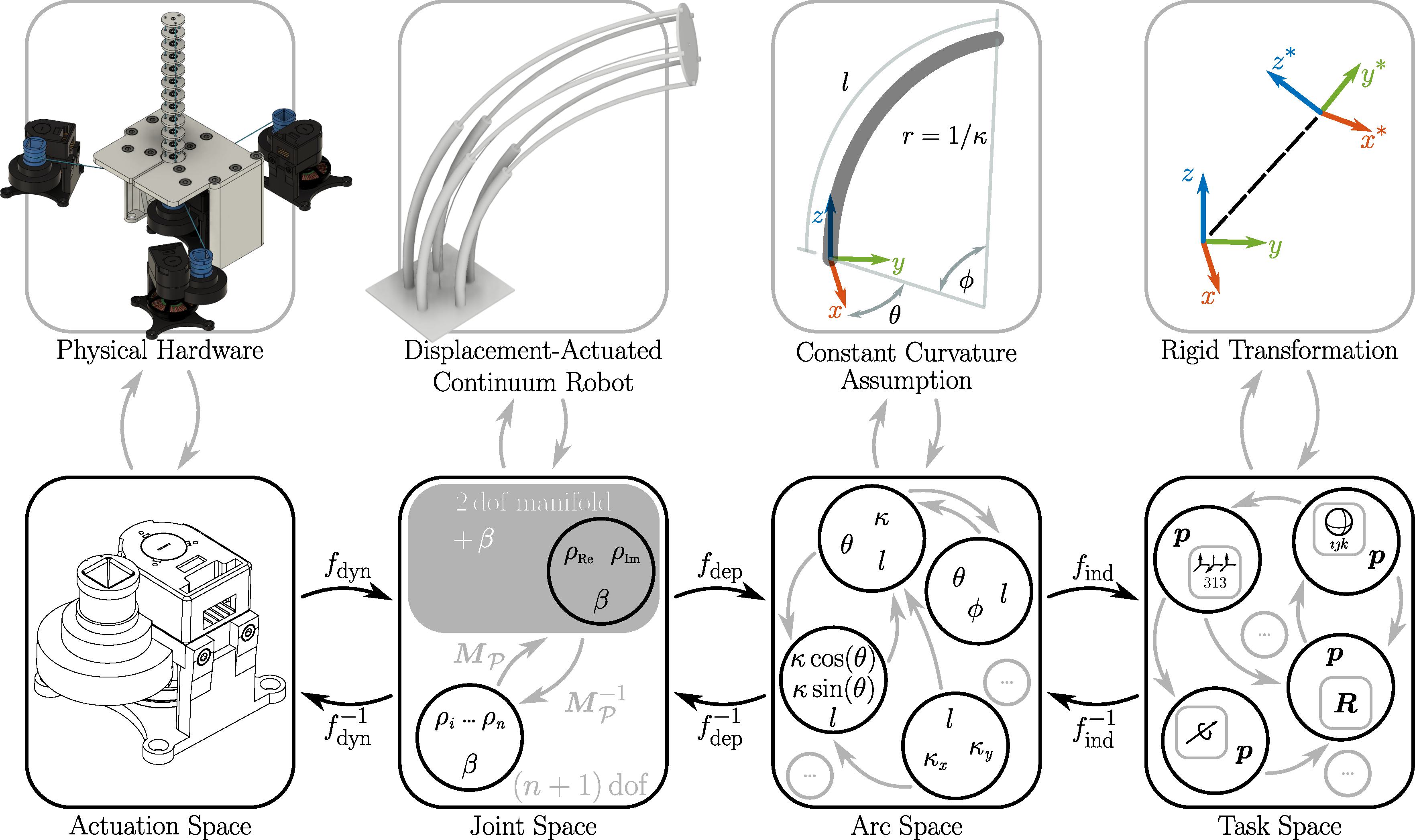
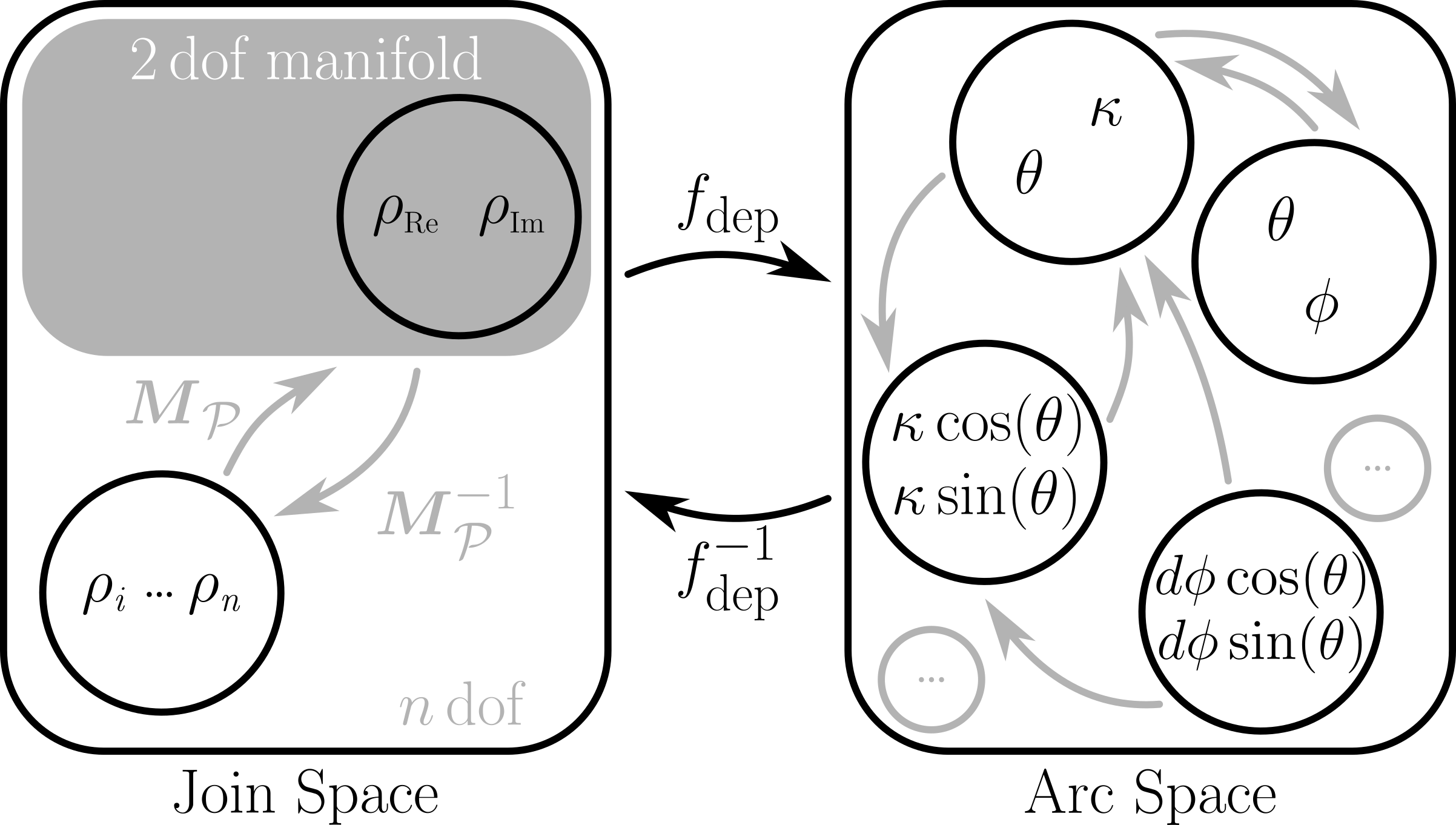
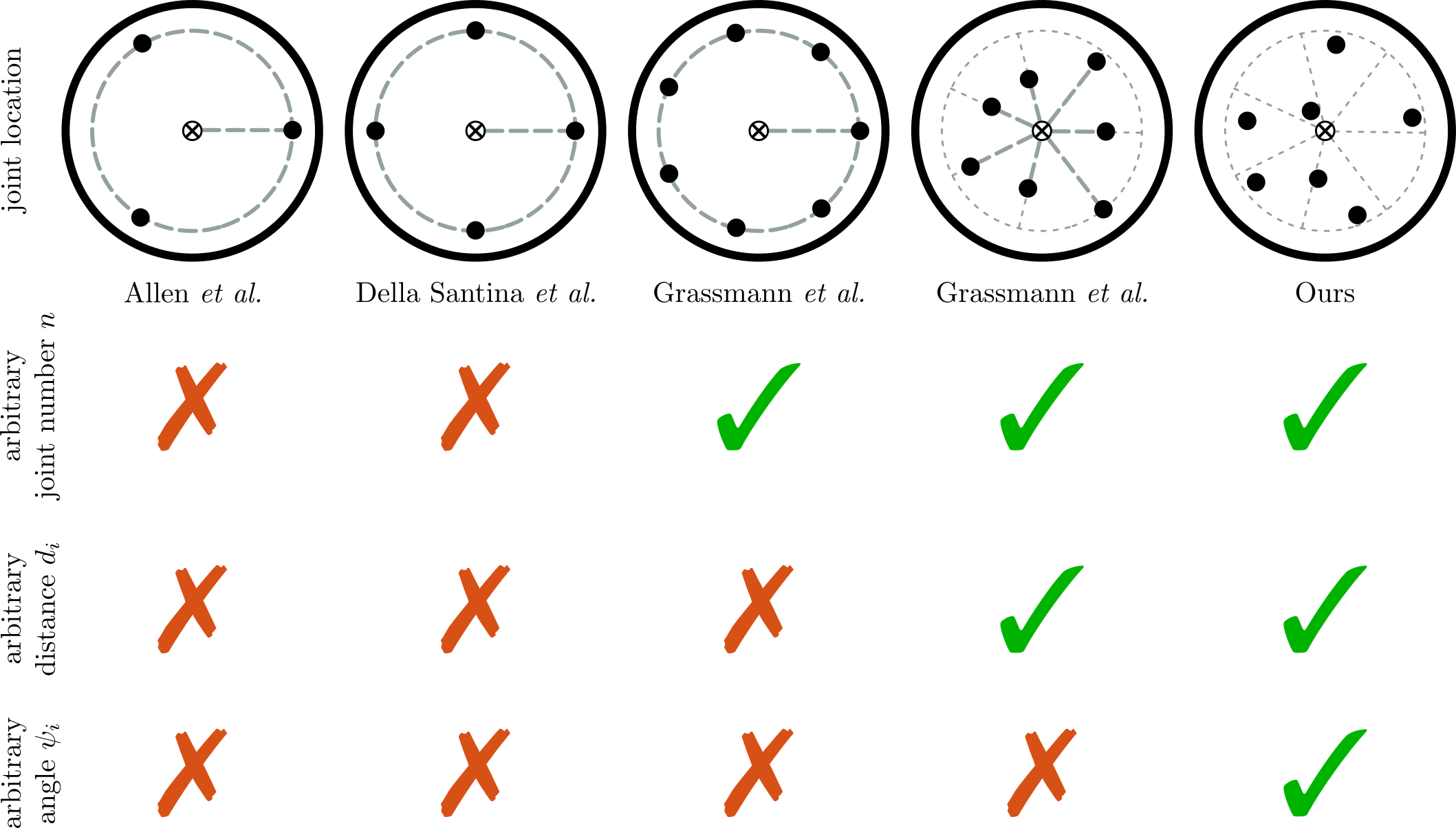
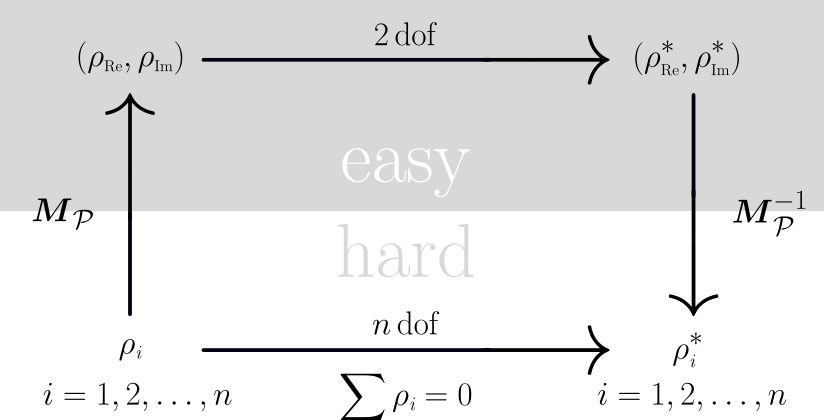
Reinhard M. Grassmann, Anastasiia Senyk, Jessica Burgner-Kahrs arXiv, 2024 preprint / arXiv / BibTex / Cheat Sheet / extended abstract (arXiv) We propose the Clarke transform and Clarke coordinates, enabling the development of methods on the two-dimensional manifold embedded in the n-dimensional joint space. #Manifold #Representation #ContinuumRobot |

|
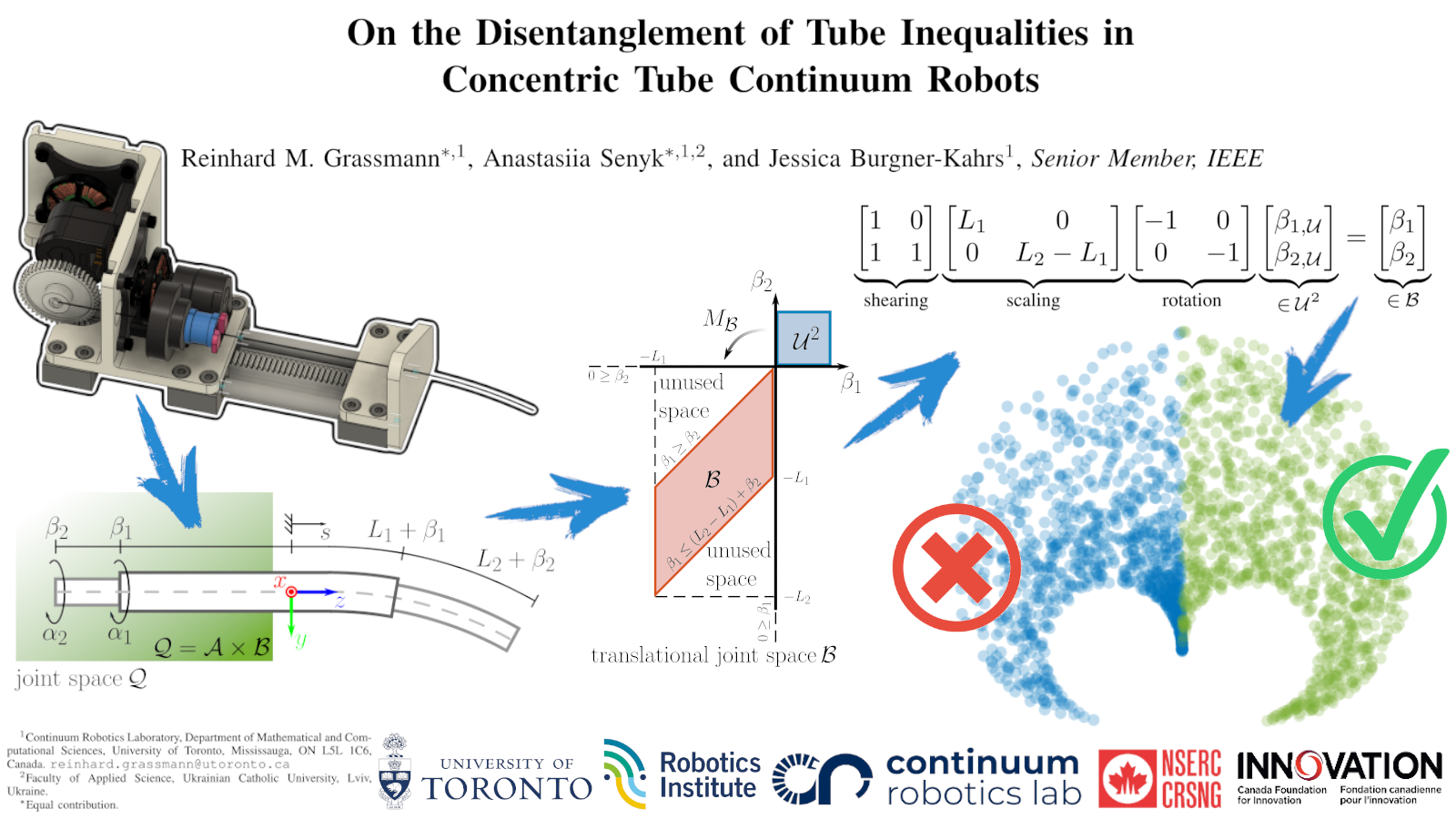
Reinhard M. Grassmann, Anastasiia Senyk, Jessica Burgner-Kahrs IEEE ICRA, 2024 reprint / IEEE Xplore / arXiv / BibTex / graphic abstract We derive and investigate the lower triangular transformation matrix to disentangle the tube inequalities. #Disentanglement #Representation #ContinuumRobot |
|
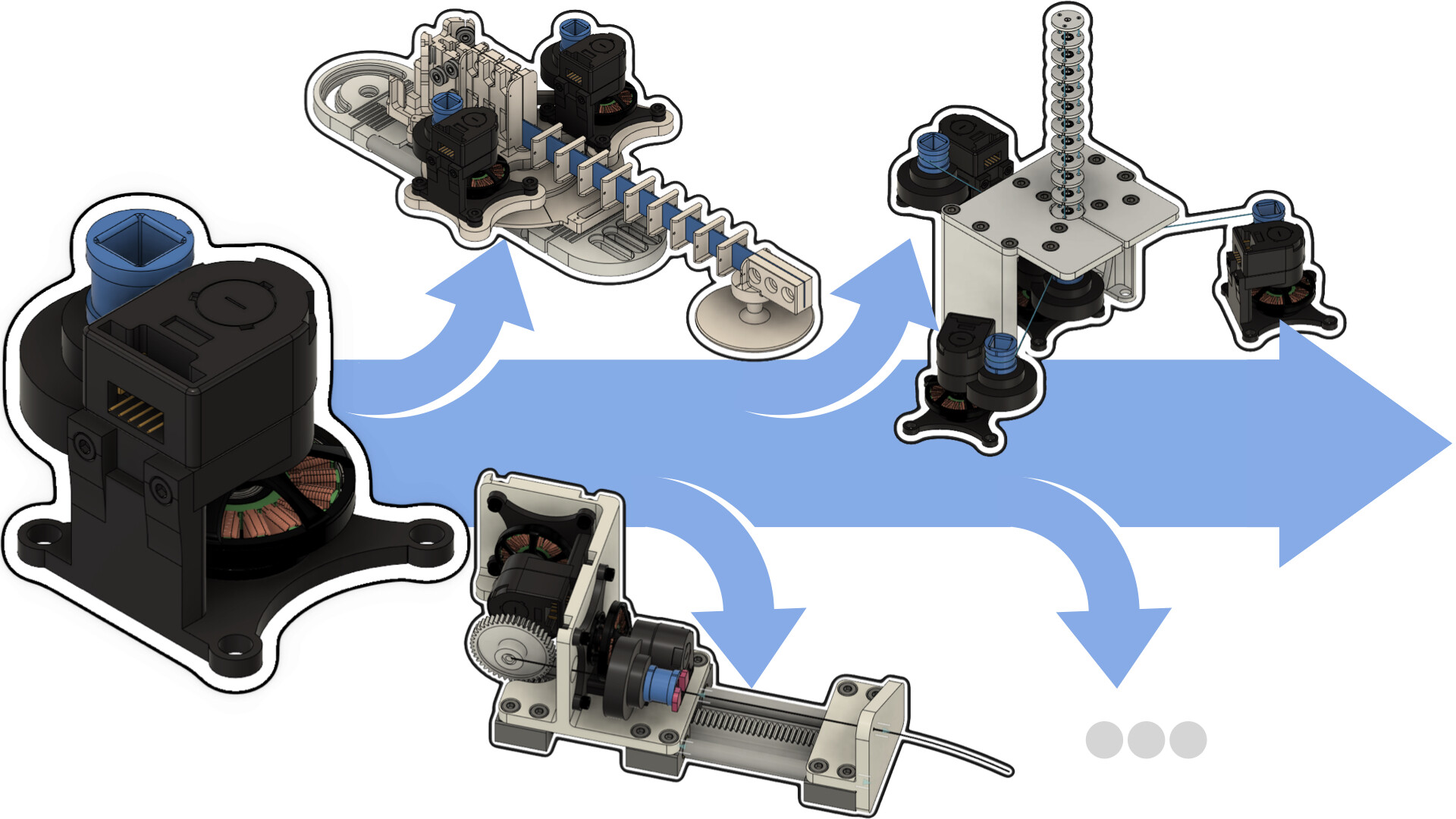
Reinhard M. Grassmann, Chengnan Shentu, Taqi Hamoda, Puspita Triana Dewi, Jessica Burgner-Kahrs Frontiers in Robotics and AI, 2024 reprint / arXiv / Front. Robot. AI / BibTex / YouTube / OpenCR Project To democratize continuum robots research, we propose an actuation module to build torque-controlled continuum robots and provide open-source software and hardware with our initiative called the Open Continuum Robotics Project. #Design #TorqueControl #ContinuumRobot #Systempaper |
|
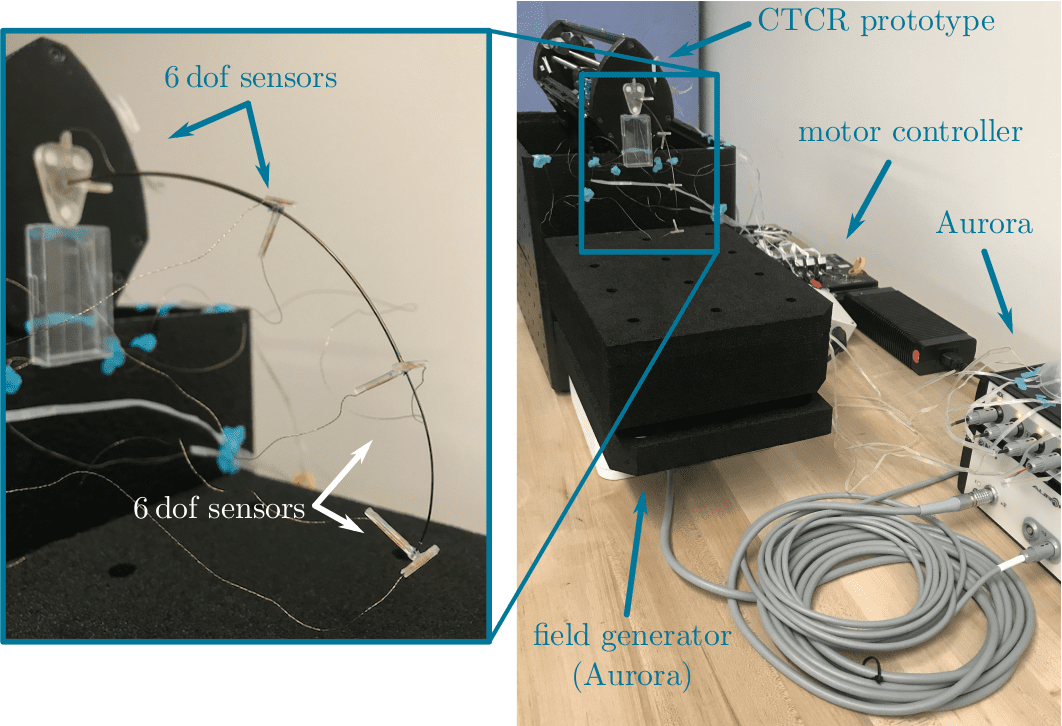
Reinhard M. Grassmann, Ryan Zeyuan Chen, Nan Liang, Jessica Burgner-Kahrs IEEE/RAS IROS, 2022 reprint / IEEE Xplore / BibTex / YouTube / GitHub We provide the first public dataset for a three-tube CTCR to democratize research on learning-based and physics-based modelling of the kinematics. #Dataset #MachineLearning #ContinuumRobot |
|
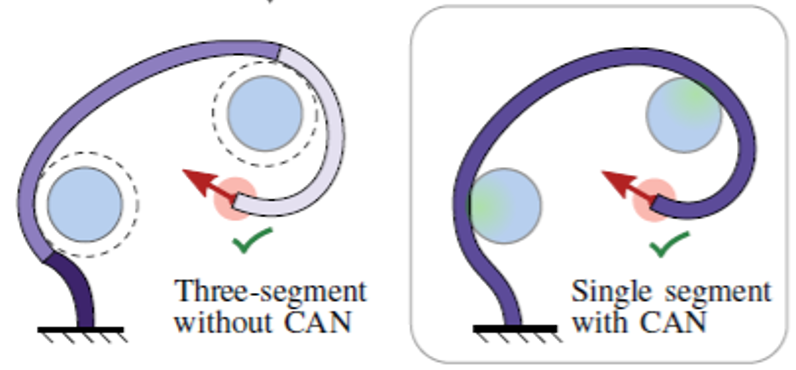
Reinhard M. Grassmann, Priyanka Rao, Quentin Peyron, Jessica Burgner-Kahrs Frontiers in Robotics and AI, 2022 paper / Front. Robot. AI / BibTex To achieve variable tendon routing, we propose a segment design that combines two distinct characteristics of tendon-driven continuum robots, i.e., variable length and non-straight tendon routing, into a single segment by enabling rotation of its backbone. #Design #VariableTendonRouting #ContinuumRobot |
|
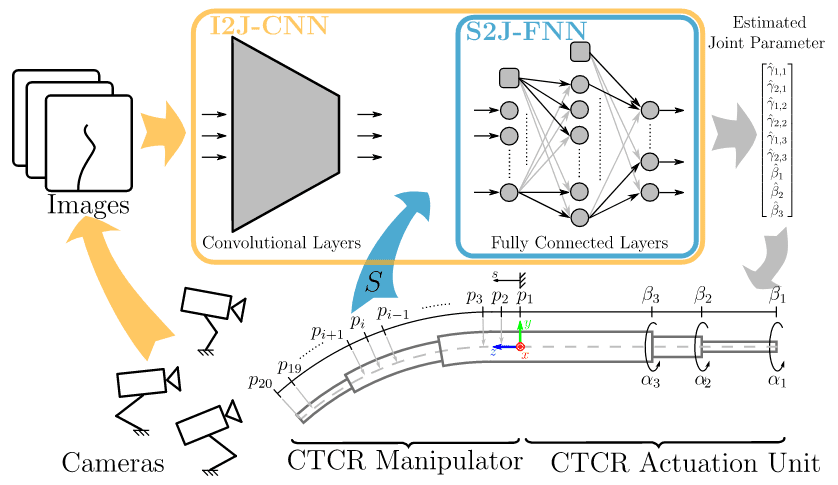
Nan Liang Reinhard M. Grassmann, Sven Lilge, Jessica Burgner-Kahrs IEEE ICRA, 2021 reprint / IEEE Xplore / BibTex We introduce methodologies to compute the inverse kinematics for concentric tube continuum robots from a desired shape as input. #MachineLearning #ShapeRepresentation #ContinuumRobot |
|
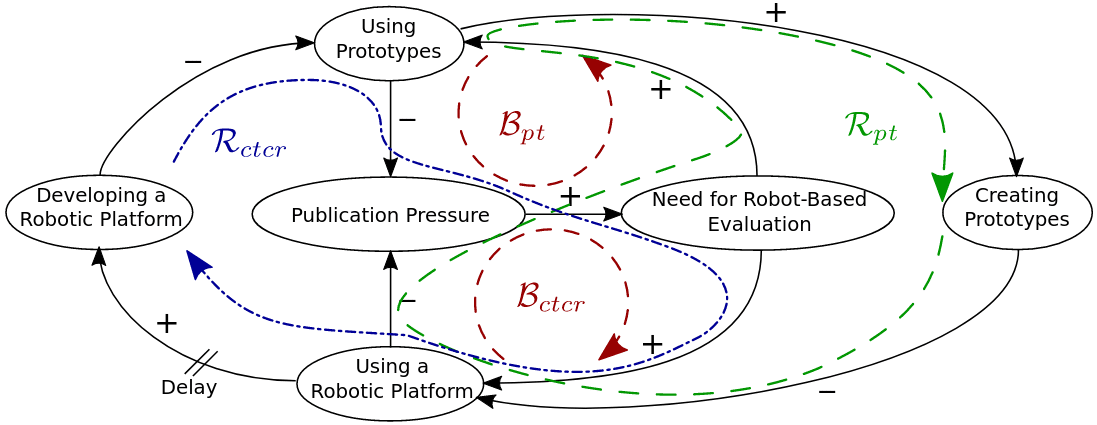
Reinhard M. Grassmann, Sven Lilge, Phuong Le, Jessica Burgner-Kahrs IFRR RSS Workshop on Retrospectives in Robotics, 2020 reprint / OpenReview / RSS Workshop: Robotics Retrospectives / YouTube / BibTex We discuss the impact of the current habit of developing a variety of different prototypes on the emergence of a ubiquitous robotic platform. #SystemThinking #ContinuumRobot |
|
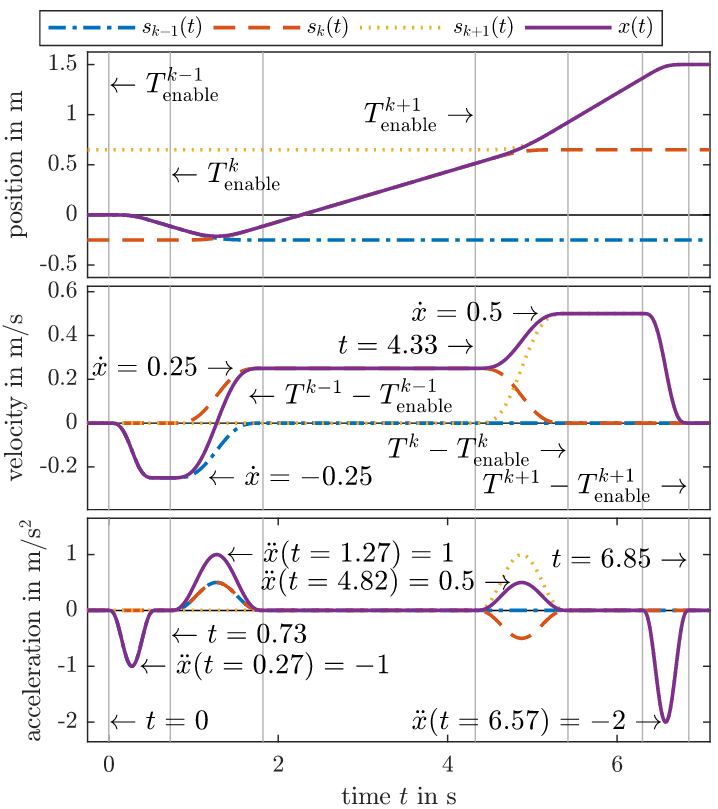
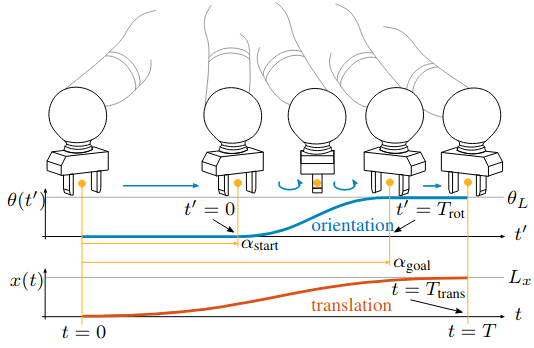
Reinhard M. Grassmann, Jessica Burgner-Kahrs IEEE RA-L, 2019 reprint / IEEE Xplore / BibTex We address the problem of generating a singularity-free trajectory for multiple via poses in SE(3), while complying with the requirement of C4 continuity. #TrajectoryGeneration #Quaternion #LightWeightRobot |
|
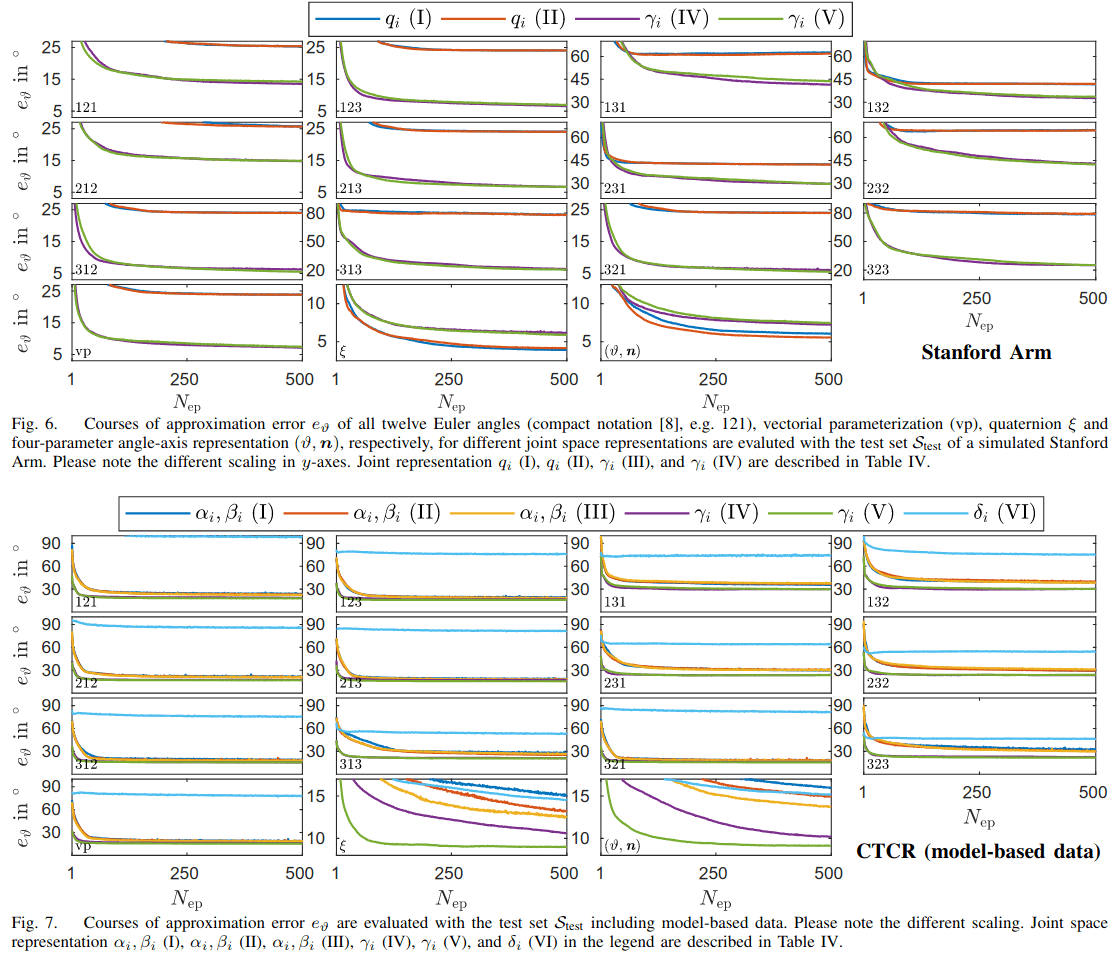
Reinhard M. Grassmann, Jessica Burgner-Kahrs IFRR RSS, 2019 reprint / RSS XV / BibTex / Poster We investigate the influence of different joint space and orientation representations on the approximation of the forward kinematics. #MachineLearning #Quaternion #ContinuumRobot |
|
Reinhard M. Grassmann, Lars Johannsmeier, Sami Haddadin IEEE/RSJ IROS, 2018 reprint / IEEE Xplore / BibTex We introduce a point-to-point trajectory planner for serial robotic structures that combines the ability to avoid self-collisions and to respect motion constraints, while complying with the requirement of being C4 continuous. #TrajectoryGeneration #Quaternion #LightWeightRobot |
|
Reinhard M. Grassmann, Vincent Modes, Jessica Burgner-Kahrs IEEE/RSJ IROS, 2018 reprint / IEEE Xplore / BibTex We introduce a joint description to learn the forward and inverse kinematics for concentric tube continuum robots from real robot measurements. #MachineLearning #Quaternion #ContinuumRobot |
|
Theses that I wrote during my mechatronics studies at Leibniz University Hannover. |
|
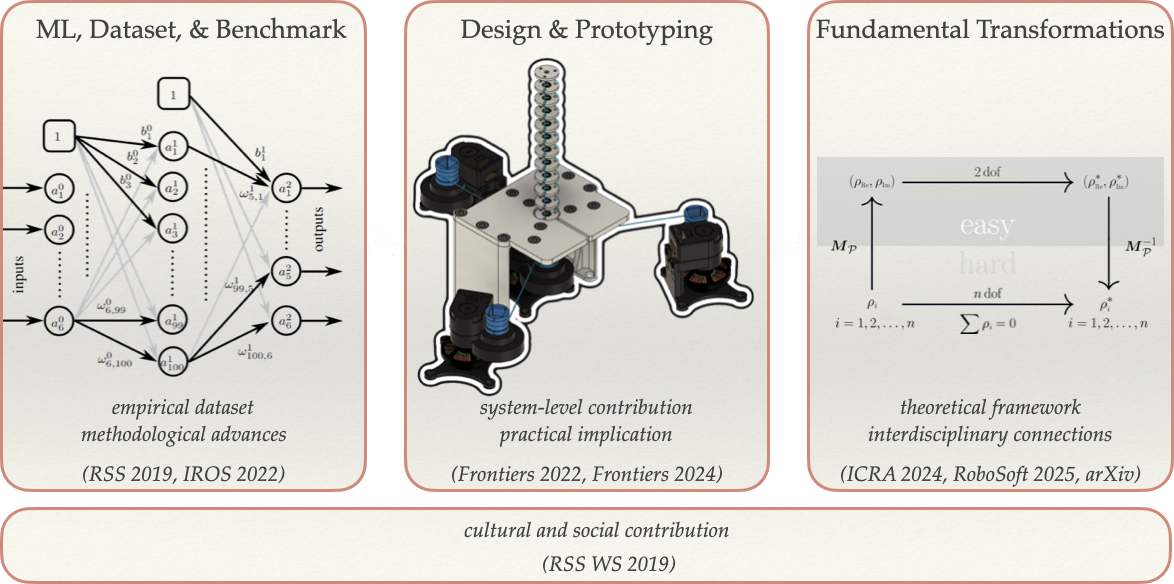
"Towards Open Continuum Robotics" Ph.D. thesis supervised by Prof. Dr.-Ing. Jessica Burgner-Kahrs Some of the results have been published in RSS (WS) 2020, RSS 2019, IROS 2022, Frontiers 2022, Frontiers 2024, ICRA 2024, and RoboSoft 2025, or are currently under review ( arXiv 2024 and arXiv 2024b). |
|
"Artificial Neural Networks for Learning Forward and Inverse Kinematics of Tubular Continuum Robots" Master’s thesis supervised by Prof. Dr.-Ing. Jessica Burgner-Kahrs Thesis was awarded the Honoree of the NiedersachsenMetall Foundation for outstanding achievements at the Faculty of Mechanical Engineering, LUH, Germany. Some of the results have been published in IROS 2018. |
|
"Generating Smooth Trajectories for Obstacle Avoidance via Quaternions in Cartesian Space" Bachelor’s thesis supervised by Prof. Dr.-Ing. Sami Haddadin Some of the results have been published in IROS 2018. |
|
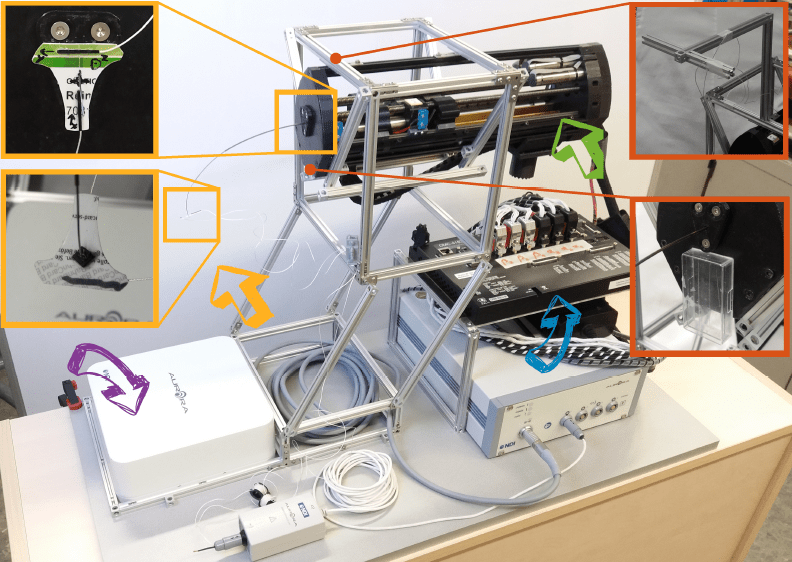
"Data Fusion Using an Extended Kalman Filter for an Optically Navigated Light Weight Robot" Project thesis supervised by Prof. Dr.-Ing. Tobias Ortmaier |
|
Research projects with my involvement. |

{kind=link}
|
I made it in the acknowledgment section of the following papers and video :) - Parametric Design of a Tendon-Driven Continuum Robot for Industrial Application (IEEE RoboSoft 2025)- Continuum Robotics: Innovation Inspired by Nature (Tunyalux Langsub's Master's Research Project, 2024) - A Non-Linear Model Predictive Task-Space Controller Satisfying Shape Constraints for Tendon-Driven Continuum Robots (IEEE RA-L, 2024) - A Lightweight Modular Segment Design for Tendon-Driven Continuum Robots with Pre-Programmable Stiffness (IEEE RoboSoft 2024) - Shape Representation and Modeling of Tendon-Driven Continuum Robots Using Euler Arc Splines (IEEE RA-L, 2022) - Experiments in Autonomous Driving Through Imitation Learning (arXiv, 2020) |
The page was designed to last. See the Manifesto for Preserving Content on
the Web by Jeff Huang for more information.
Design and source code from Jon Barron's website.